

Early surgical robots in joint replacement
I have been following the development of robots for use in orthopaedic surgery for over 20 years. In the early 2000s, I visited several centres in Europe using ROBODOC. This was a type of active robot. This was a robotically controlled bone removal mill that required a huge exposure. The surgeon would set the machine up and press “go” then wait while the robot did the work. Personally, at that time I was not keen to hand my patients over to a robot. There were high fracture rates and other problems with this technology.
Then came passive robots
The focus shifted to development of “passive” robots. These are simply tools operated by the surgeon but the surgeon is always in direct control. The robotic technology assists the surgeon in delivering greater precision in the bone removal. There are a couple of different ways that this can be achieved and we have been watching these developments very carefully.
The next generation of surgical robots.
The last 10 years has seen great progress and not surprisingly, we are seeing companies move towards the development of smart compact hand held robots. Blue Belt Technologies introduced a small hand held robot for knee replacement and I am pleased to have performed the first surgery in Australia with this device in February 2015. For those patients who are interested, here is an overview of how it works. The Navio System is a handheld portable smart instrument.
The surgeon holds the device and we refer to a computer screen throughout the procedure.
The first step is to attach trackers to the two bones. The bone is then registered to the trackers and the surfaces of the arthritic knee are mapped.
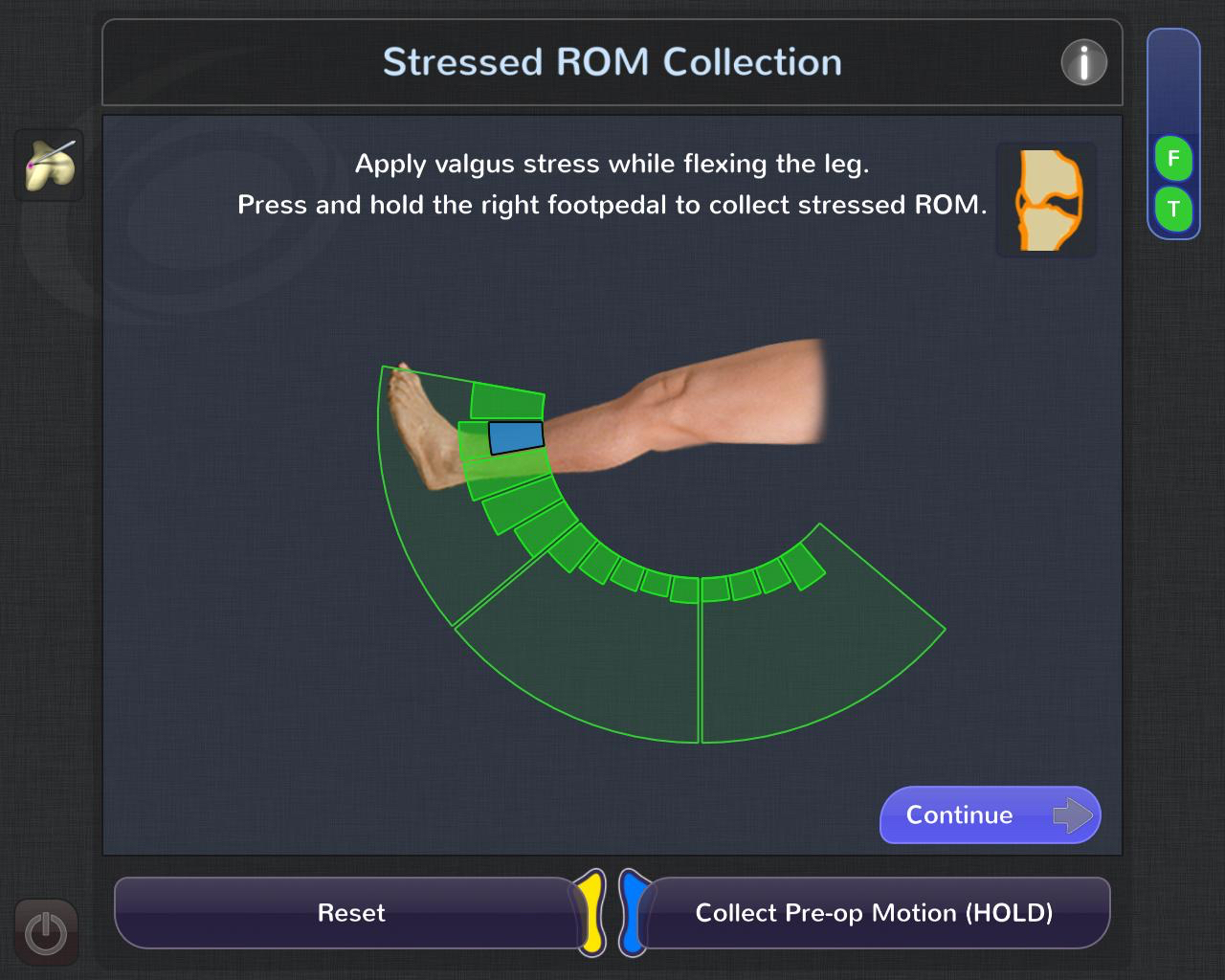
Kinematic analysis is performed to assess the abnormal movement due to the arthritis.
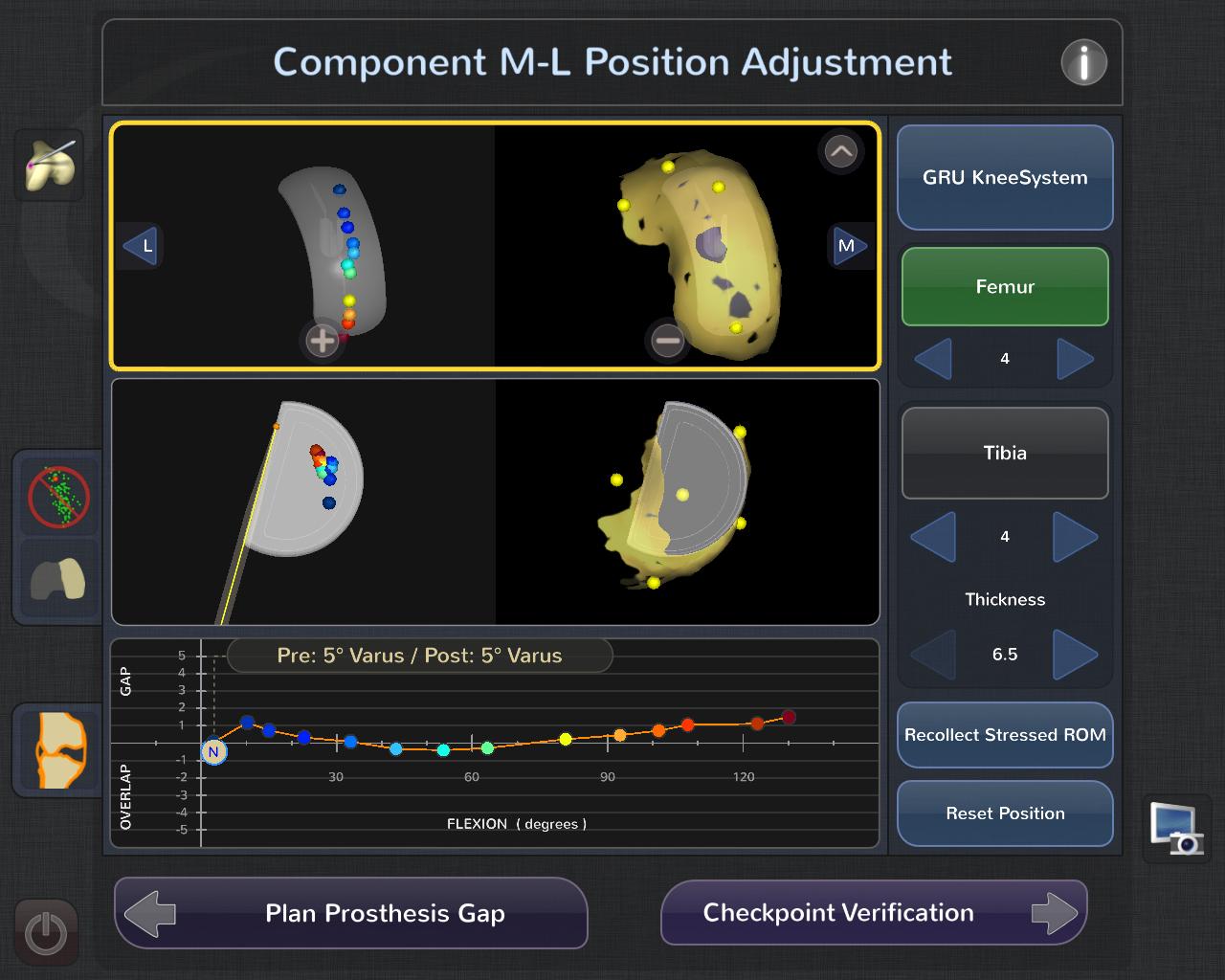
The precision planning then begins. The implant can be placed in the patient bone model on the computer screen.

The position can be adjusted while the surgeon sees the impact that this has on the mechanics of the knee such as the gap between the components.
The surgeon can adjust the component positions on the screen until it is in the right place before making a cut to the bone. The surgeon then removes the bone required to place the implant precisely where he has planned.

At the end of the case the kinematics can be assessed to confirm the correct placement of the components.
The promise of extremely precise placement of implants is an exciting step forward in joint replacement surgery. This first surgery produced a successful result, with perfect positioning of the implant on post operative X-ray (as planned), and in that respect I am pleased with the outcome. Once our patient returns for early post-operative follow-up visit, I will update this article. I will also provide further thoughts how this robot performs in other patients and as this sort of technology develops further.
Note:
Professor Walter has NO financial interest in the robotic device mentioned in this article.